会进化的算法大脑:解密“雷视融合”轻量化端到端方案
发布时间:2025-08-19
分享:



几何伙伴自主研发的“双网协同”端到端算法体系,有效降低了端到端方案的大算力依赖,以创新安全策略守护辅助驾驶安全底线。
在智能汽车加速进化的浪潮中,端到端已成为行业公认的组合辅助驾驶技术范式。这种从感知到车辆控制的全链路优化架构,凭借其强大的场景泛化及数据驱动下的高效迭代能力,正在不断推动辅助驾驶技术向更加安全、舒适、拟人的方向进化。
端到端辅助驾驶方案的实现,有赖于算法模型、算力与数据闭环协同作用,特别是复杂城市场景下的辅助驾驶功能,往往需要更高的算力来实现。几何伙伴自主研发的“双网协同”端到端算法体系,有效降低了端到端方案的大算力依赖,以创新安全策略守护辅助驾驶安全底线。面向不同算力平台,这套算法体系在实现性能体验与量产可行性平衡的同时,为L2至以上级别辅助驾驶的规模化落地打造了一套更具“智价比”的解决方案。
三网合一:高效部署,降低算力依赖
端到端算法的“感知—决策—控制”一体化框架,有效解决了传统模块化方案的信息损耗,但仍然存在较高的算力需求与可解释性等问题。以市场量产需求为导向,几何伙伴行泊一体辅助驾驶3.0系统(下称“G-PAL 3.0系统”)将轻量化作为破题思路,提出了一套包含通用感知网络 GGPNet(G-PAL General Perception Net)与通用规控框架GPDPNet(G-Pal Decision&Planning Net)的算法架构,实现了端到端方案在中算力平台的高效部署。
在感知端,GGPNet应用三网合一感知模型,将动态 OD、障碍物 OCC、静态道路结构感知任务收拢同一个多任务学习框架中,共用特征提取 Backbone,并使用任务特定解码器并行进行感知结果输出,极大提升了感知效率和信息处理的协同性。GGPNet具备卓越的多模态传感器融合能力,能够将摄像头捕捉到的丰富视觉信息与4D成像雷达提供的精准距离、速度等信息,通过算法映射到统一的 BEV(Bird’s Eye View)空间,为辅助驾驶提供更加高效精准的场景特征编码,使车辆能够 “看”得更全面、“懂”得更透彻。
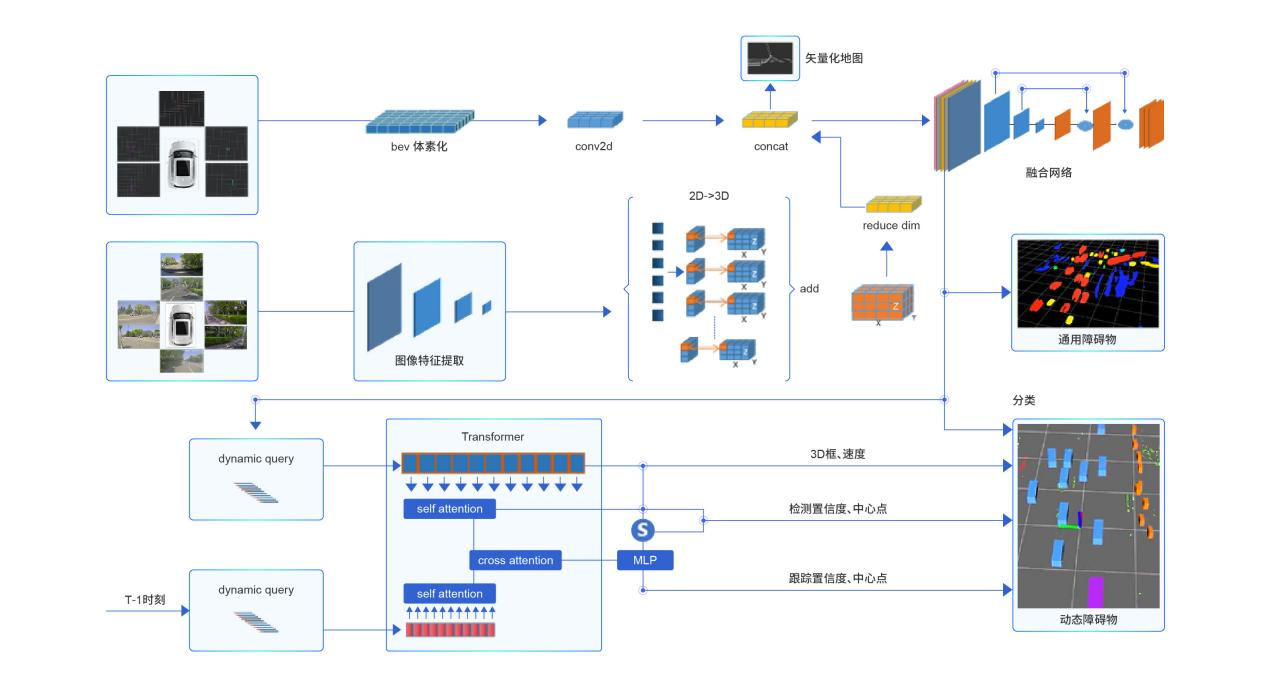
▲ 几何伙伴通用感知网络GGPNet
基于Transformer 交叉注意力机制,GGPNet可通过 Query–Key–Value三元组将异构传感空间投影到公共语义空间,实现可学习的动态模态软对齐。与基于几何先验的硬配准相比,它能够自适应地补偿不同模态间分辨率、视场和采样密度的差异,跨越模态鸿沟(modality gap),实现相机图像、4D成像雷达点云等不同模态数据的相互补充。
在信息聚合方面,自注意力机制赋予模型强大的长程建模能力,而交叉注意力机制在此基础上更进一步,允许任一目标模态(如BEV网格Query)按需检索源模态(如图像Patch或点云Key/Value)中的全局—局部细节 。这种“按需聚合”的方式,既避免了CNN感受野受限导致的远距信息丢失,同时也保留了细粒度几何线索,确保车辆对周围环境的感知更加细腻准确。
任务引导稀疏交互,是这套算法的另一大亮点,能够为辅助驾驶系统在中低算力平台上的部署提供有效支持。在多头机制下,每个注意力头可视为一条独立子空间通道,通过为不同感知任务(检测、分割、深度补全)设置任务特定Query tokens,仅在计算图上激活与任务相关的源特征子集,实现计算稀疏化与表征解耦。这不仅显著降低了二次复杂度带来的显存压力,更能提高计算效率,使模型在有限的硬件资源下实现高效运行。
为了实现更灵活的算力平台适配,这套算法方案能够根据产品需求进行组件裁剪,同时对于特定的AI任务,算法可结合部署平台的特性,选择合适的算子与模型结构,并进行针对性优化。此外,在交叉注意力层完全可微,可直接嵌入端到端框架进行联合优化。其注意力权重矩阵能够天然提供跨模态关联热图,使模型决策过程更加可视化,为诊断融合质量和网络调试提供定量依据,帮助进一步提升模型性能。
可解释的端到端:拟人决策,守护共驾安全
安全是一切智驾体验的基石,也是辅助驾驶技术必须坚守的“生命线”。在端到端架构中,规划问题往往不是确定性的,且直接面向最终系统功能的实现。为了更好守护共驾安全,几何伙伴端到端方案采用了策略模型与时空联合轨迹规划相结合的技术路线。其中,前者负责提升决策拟人性与灵活性,后者则进行更加精细化的时空域轨迹求解,确保系统在复杂环境下的安全可靠。
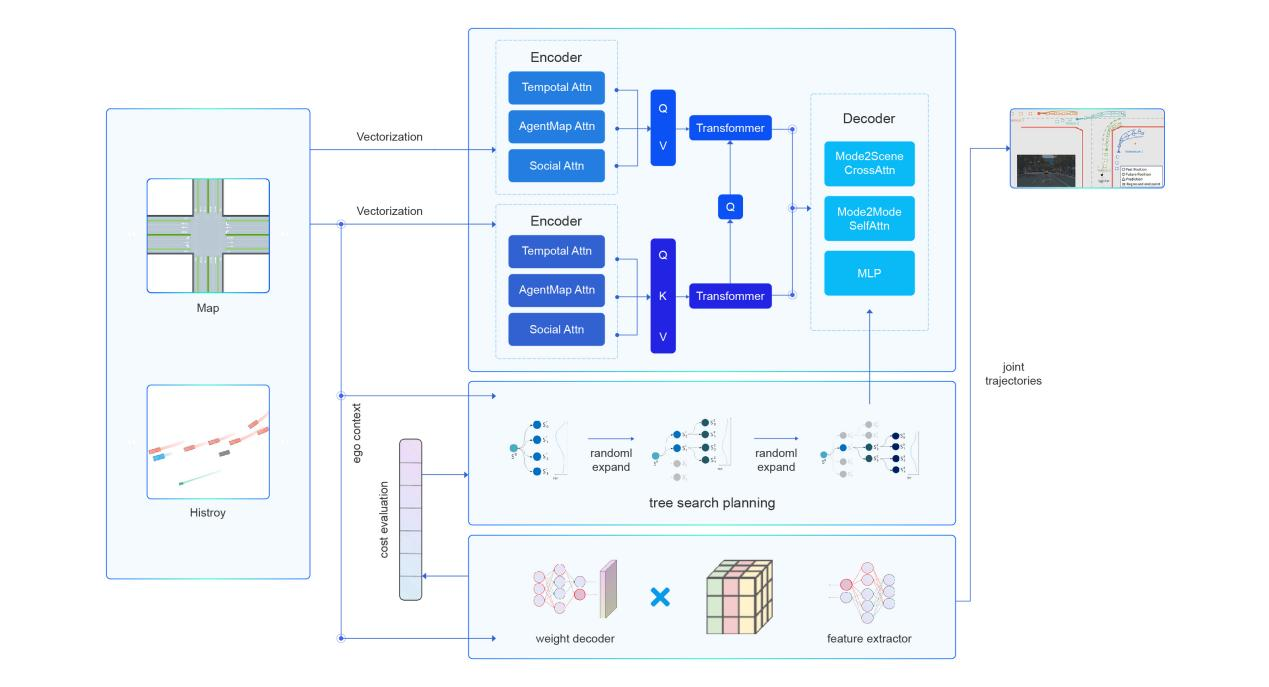
▲ 几何伙伴通用规控框架GPDPNet
策略模型方面,GPDPNet引入基于注意力机制的预测决策一体化网络模型,通过大规模人驾数据来驱动模型学习拟人化驾驶行为,并输出策略级粗轨迹,供下游数值优化模块作为初解使用。相比传统的基于推理或规则的决策过程,这条技术路线无需对众多参数进行调整,而是通过深度学习进行拟合,使整体决策结果更加高效。考虑到硬件性能特点,该方案模型针对地平线J6系列等部署平台进行了定向优化,确保推理速度满足系统实时性需求,保障车辆在各种复杂路况下的驾驶安全。
同时,为充分规避端到端架构的“黑盒问题”,GPDPNet嵌入了可解释性规划模块,采用MCTS蒙特卡洛决策树策略校验方法。该框架通过构建树形结构形成一个场景中的策略全集,并以动态规划等手段获取最优策略,可用于解决辅助/自动驾驶中的连续空间决策规划问题。这套数据驱动方案将MCTS与模型结合,能够实现推理过程中的条件运动预测和成本函数计算,提升决策准确性。
为了进一步优化系统在复杂城市场景的规控表现,几何伙伴端到端方案应用了基于数值优化的时空联合规划技术。传统的时空解耦规划方案(先横后纵或先纵后横)均存在解空间小的局限性,虽然在高速巡航等场景表现较好,且易于调试,但在城区交互场景中往往存在性能瓶颈,无法实现横纵同时具备动作的场景需求。而时空联合规划将横向路径规划和纵向速度规划合并为一个统一优化问题,可使解空间更完备,充分提升系统的环境适应性。在时空联合主规划器外,这套方案还配置了独立的安全兜底规划器,根据车辆状态推演出自车未来的可能轨迹,并结合环境感知进行自车行为危险性评估,对于危险性较高的场景,会基于推演轨迹进行制动,保障行车安全。
几何伙伴端到端方案的另一重创新安全策略,在于将 4D 成像雷达感知结果引入了规控框架。由于强大穿透力与独特的全天时全天候特性,4D 成像雷达能够为系统提供更丰富的障碍物特征,从而提升感知的位置精度和速度精度,并提供障碍物的不确定性表征。GPDPNet将这些不确定性纳入决策过程,从而更加灵活稳健地调整行驶策略。多重安全托底保障相结合,这套“可解释”的端到端方案能够展现出更强场景泛化能力,为人机共驾打造可靠、持续的安全看护。
数据驱动“算法大脑”持续进化
在辅助驾驶走向普及的过程中,轻图以及无图方案深度契合市场的规模化落地需求,应用价值日渐凸显。相比于高精地图方案所具备的丰富路面语义信息,轻图与无图方案需要通过更快速、精准的实时感知与环境重构,为辅助驾驶下游环节提供可靠依据,而这无疑对算法提出了更高的要求。
以G-PAL 3.0系统为例,该系统主要应用无图技术路线,接收传统车机导航,包含自车未来行驶范围的引导信息。基于11路视觉摄像头+5路4D成像雷达的多传感器异构融合信息输入,系统算法可构建自车局部范围内的道路结构,并充分提升对于道路边沿、栅栏、通用障碍物等目标的检出。通过深度融合目标检测信息、导航信息与局部道路结构,这套方案不依赖高精地图即可实现城市/城际NOA(领航辅助)等功能。
依托自研数据平台,几何伙伴实现了高质量数据采集、自动标注、模型训练与测试的全链路闭环,以大规模实车数据与海量仿真数据为基石,帮助端到端算法模型进行日级的高效迭代,让系统“大脑”从可用向好用持续进化。
写在最后
当汽车产业智能化浪潮奔涌向前,安全与体验的双重升维已成为行业共识。几何伙伴深知,辅助驾驶不仅是技术的突破,更是对生命价值的敬畏、对用户信赖的坚守。以雷视融合为感知基石,以数据驱动为算法进化引擎,更以全链路安全策略为防护盾牌,几何伙伴正在为人机共驾构筑起立体化的安全屏障。
作为系统级赋能者,几何伙伴不仅致力于打造“越用越聪明”的辅助驾驶系统,更将以高安全标准为锚点,与产业链伙伴共同努力,让前沿方案惠及更广泛市场,让辅助驾驶真正成为值得信赖的出行伙伴。未来,几何伙伴也将与行业同仁携手,以更具智价比的解决方案推动辅助驾驶规模化落地,共同引领城市出行方式变革,书写“智行安达”的新篇章。